



焊接机器人按结构坐标系分为几类?
来源:http://www.tayfsk.com/ 发布时间:2021-07-28 浏览次数:0
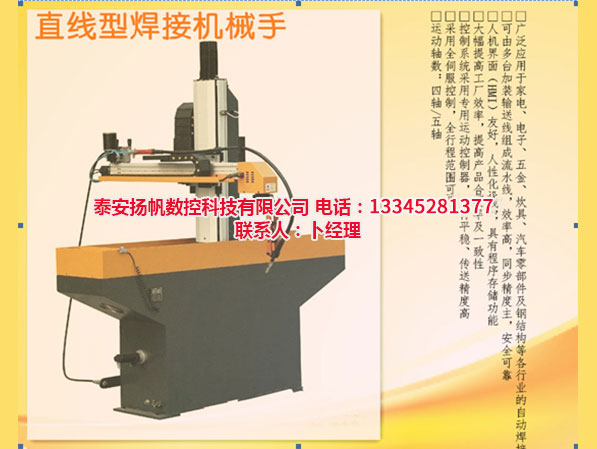
1)直角坐标型这类机器人的结构和控制方案与机床类似,其到达空间位置的三个运动(x、y、z)是由直线运动构成,这种形式的机器人优点是运动学模型简单,各轴线位移分辨率在操作容积内任一点上均为恒定,控制精度容易提高;缺点是机构庞大,工作空间小,操作灵活性较差。简易和专用焊接机器人常采用这种形式。
1) The structure and control scheme of the Cartesian coordinate type robot is similar to that of the machine tool. Its three motions (x, y and z) reaching the spatial position are composed of linear motion. The advantages of this type of robot are that the kinematic model is simple, the displacement resolution of each axis is constant at any point in the operating volume, and the control accuracy is easy to be improved; The disadvantage is that the mechanism is huge, the working space is small, and the operation flexibility is poor. This form is often used by simple and special welding robots.
2)圆柱坐标型这类机器人在基座水平转台上装有立柱,水平臂可沿立柱作上下运动并可在水平方向伸缩。这种结构方案的优点是末端操作可获得较高速度,缺点是末端操作器外伸离开立柱轴心愈远,其线位移分辨精度愈低。
2) The cylindrical coordinate robot is equipped with a column on the base horizontal turntable, and the horizontal arm can move up and down along the column and retract in the horizontal direction. The advantage of this structural scheme is that the end operator can obtain high speed, but the disadvantage is that the farther the end operator extends away from the axis of the column, the lower the linear displacement resolution accuracy.

3)球坐标型与圆柱坐标结构相比较,这种结构形式更为灵活。但采用同一分辨率的码盘检测角位移时,伸缩关节的线位移分辨率恒定,但转动关节反映在末端操作器上的线位移分辨率则是个变量,增加了控制系统的复杂性。
3) Compared with cylindrical coordinate structure, spherical coordinate structure is more flexible. However, when the code disk with the same resolution is used to detect the angular displacement, the linear displacement resolution of the telescopic joint is constant, but the linear displacement resolution of the rotating joint reflected on the end operator is a variable, which increases the complexity of the control system.
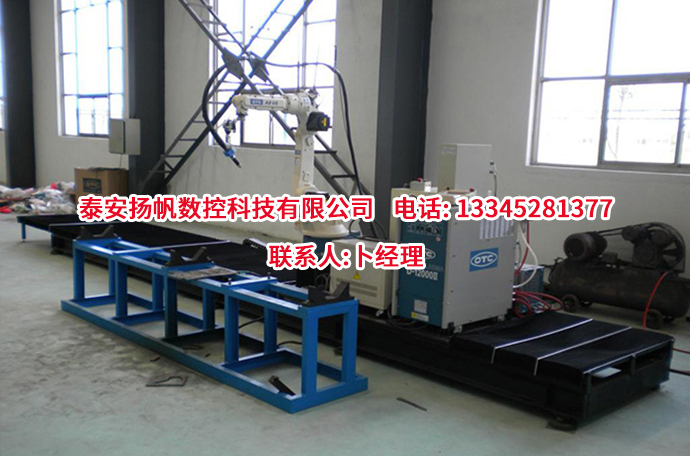
4)全关节型全关节型机器人的结构类似人的腰部和手部,其位置和姿态全部由旋转运动实现,其优点是机构紧凑,灵活性好,占地面积小,工作空间大,可获得较高的末端操作器线速度;其缺点是运动学模型复杂,高精度控制难度大,空间线位移分辨率取决于机器人手臂的位姿。
4) The structure of all joint robot is similar to human waist and hand. Its position and posture are realized by rotary motion. Its advantages are compact mechanism, good flexibility, small floor area, large workspace and high linear speed of end manipulator; Its disadvantage is that the kinematic model is complex, high-precision control is difficult, and the spatial linear displacement resolution depends on the pose of the robot arm.
上一篇:自动焊接机器人可以应用到哪些行业?
下一篇:焊接变位机的卡盘应该如何进行维护?